"Beats Flex-fragment design special edition" is now on sale on Apple's official website
11/03/2022


In this session, it was written by Yuyi Yamashita, who hosts the Web media "Seamless", to introduce the latest research in science and technology. Mr. Yamashita selected and explained scientific papers with high novelty.
Developed by the Delft Institute of Technology in the Netherlands and the Westphalian University of Applied Sciences research team in Germany, Enhancing optical-flow-based control by learning visual appearance cues for flying robots is a machine learning system that allows drones to avoid stable obstacles and land smoothly. It is suggested that bees land and stop on flowers while avoiding obstacles and predators.
ミツバチが障害物を回避し花に降りて止まるスキルをまねたドローンシステムIt is said that one reason why bees can use this skill is caused by light flow. The so-called optical flow refers to the flow that calculates the velocity field (the speed of the object and the camera) from the flow of an object that crosses the field of vision (an object that is photographed together even if it moves) and is represented by a vector. In the case of bees, by calculating and avoiding the distance between visible obstacles in flight, when landing on a flower, the light flow stops steadily and steadily by decelerating.
Try to find out whether it can land smoothly and avoid obstacles stably, but it turns out that the two problems unique to the optical flow are not smooth.

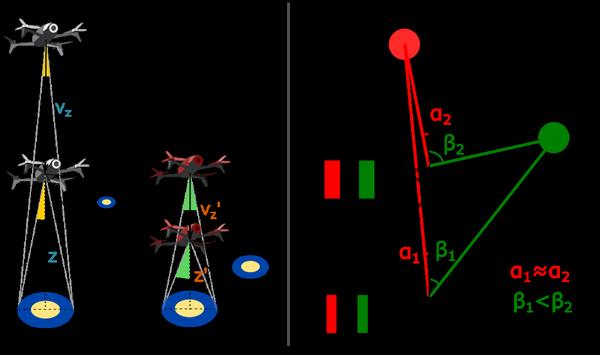
The first problem is that top-to-bottom drones cannot accurately detect landings. For example, when preparing two drones, one of which is set to descend from twice the height of one side and land at twice the speed, both are the same optical flow. Such drones are chaotic and will vibrate up and down over the ground.
The second problem is that the optical flow of obstacles seen from the front during flight is too small to detect. On the other hand, because the angle of the obstacle next to the UAV varies greatly, it is easy to detect.
オプティカルフローを活用できるよう改造したドローンにおける2つの問題点を表した図。(左)白いドローンは、赤いドローンの2倍の高さから2倍の速さで降下するが、どちらの場合も同じオプティカルフローが得られる。(右)飛行中に真正面から現れる物体(赤)はオプティカルフローが小さいため検出しにくい。横に見える物体(緑)はオプティカルフローが大きく検出しやすいAs a solution, the team photographed the visual appearance (shape, color, texture) of the object in the field of view with a camera. After integrating the visual information and optical flow, the team successfully calculated the exact distance relative to the object (landing and obstacles).
Using the vibration of the UAV body caused by light flow, we train what objects in the environment look like at different distances through self-supervised learning.
The combination of visual information and optical flow is strong, landing more smoothly than before, and obstacle detection and avoidance in flight direction are more targeted, but also improve the overall speed of the UAV. In the animation, you can confirm the smooth landing.
室内で実験している様子着地に成功した様子Copyright ©ITmedia,Inc.All Rights Reserved.
To read more, you need to agree to the comment's terms of use and register "ITmedia NEWS Ancadesquine" and "ITmedia NEWS Ankadesquine"


-Yahoo! News")




