「Beats Flex ー fragment designスペシャルエディション」 Apple公式サイトで販売開始
11/03/2022


このコーナーでは、テクノロジーの最新研究を紹介するWebメディア「Seamless」を主宰する山下裕毅氏が執筆。新規性の高い科学論文を山下氏がピックアップし、解説する。
オランダ・デルフト工科大学と独Westphalian University of Applied Sciencesによる研究チームが開発した「Enhancing optical-flow-based control by learning visual appearance cues for flying robots」は、ドローンによる安定した障害物回避とスムーズな着地を可能にする機械学習システムだ。ミツバチが障害物や捕食者を避けながら花に降りて止まる様子をヒントにしている。
ミツバチが障害物を回避し花に降りて止まるスキルをまねたドローンシステムミツバチがこのようなスキルを使える理由の1つは、オプティカルフローによるものだといわれている。オプティカルフローとは、飛んでいる際に視界を横切る物体(動いても共通して写っている物体)の流れから速度場(物体とカメラの速度)を計算しベクトルで表現したものを示す。ミツバチでいうと、飛行中に見える障害物との距離を計算して回避し、花に降りる際はオプティカルフローを一定に保つよう減速することでスムーズに止まれる。
スムーズな着地と安定した障害物回避ができるか試した結果、オプティカルフロー特有の2つの問題からうまくいかなかった。

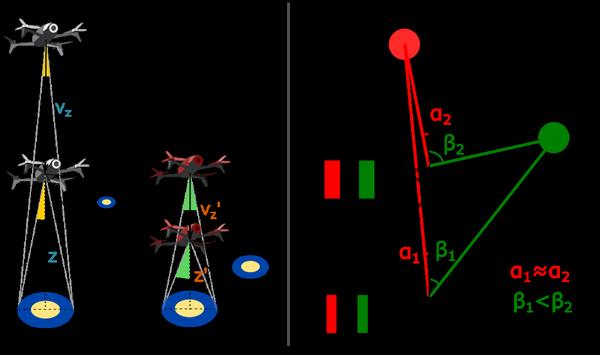
1つ目の問題は、上から真下に着地するドローンが着地面を正確に検出できないこと。例えば、2台のドローンを用意し、片方は一方の2倍の高さから2倍の速さで下降し着地するよう設定した場合、どちらも同じオプティカルフローになる。こうなったドローンは混乱し、着地面の上空で上下に振動してしまう。
2つ目の問題は、飛行中に真正面から見えてくる障害物のオプティカルフローが小さすぎて検出が困難なこと。一方、ドローンの横に位置する障害物は角度が大きく変わるため検出しやすい。
オプティカルフローを活用できるよう改造したドローンにおける2つの問題点を表した図。(左)白いドローンは、赤いドローンの2倍の高さから2倍の速さで降下するが、どちらの場合も同じオプティカルフローが得られる。(右)飛行中に真正面から現れる物体(赤)はオプティカルフローが小さいため検出しにくい。横に見える物体(緑)はオプティカルフローが大きく検出しやすい研究チームは解決策として、視界に映る物体の視覚的外観(形状、色、テクスチャ)をカメラで撮影し、視覚情報とオプティカルフローを統合したところ、物体(着地面や障害物)に対しての正確な距離の算出に成功した。
オプティカルフローによって誘発されるドローン本体の振動を使用して、環境内の物体がさまざまな距離でどのように見えるかを自己教師あり学習で訓練した。
視覚情報とオプティカルフローの組み合わせは強力で、以前よりもスムーズな着地と、飛行方向の障害物検出と回避がより的確にできるようになり、ドローンの全体的な速度も向上した。動画では、滑らかに着地する様子を確認できる。
室内で実験している様子着地に成功した様子Copyright © ITmedia, Inc. All Rights Reserved.
続きを読むには、コメントの利用規約に同意し「アイティメディアID」および「ITmedia NEWS アンカーデスクマガジン」の登録が必要です

 - Yahoo!ニュース")





